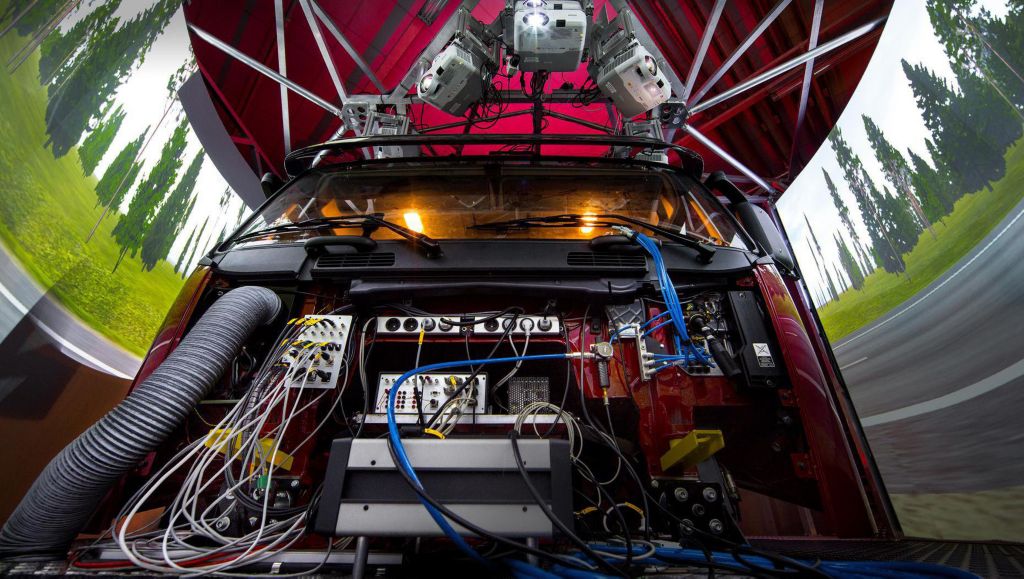
Er sitzt im Kontrollraum, in dem eine Reihe von Computern dokumentiert, wie der Testfahrer fährt, beobachtet und sich auf der Straße positioniert. So werden gewaltige Informationensmengen gesammelt. Einer der Hauptvorteile dieses Fahrsimulators, bei dem es sich um eine relativ neue Art der Prüftechnologie handelt, besteht darin, dass der Fahrer nun bereits frühzeitig in die Entwicklung neuer Produkte einbezogen werden kann.
„Bislang war es erforderlich, zuerst alles zu bauen – Straßen, Fahrzeuge und Sicherheitssysteme – bevor Tests durchgeführt werden konnten, um zu sehen, wie es in der Praxis funktioniert. Jetzt hingegen können wir dies parallel tun“, berichtet Kristoffer Tagesson.
Anders ausgedrückt: Der Fahrsimulator macht es möglich, bereits hier und jetzt neue Fahrzeuge in zukünftigen Umgebungen zu testen. Peter Nilsson, ein weiterer Werksdoktorand bei Volvo Trucks, wirkt an einem solchen Projekt mit.
„Der Arbeit an der Entwicklung von Fahrzeugen und Infrastruktur liegt eine langfristige Perspektive zugrunde. Mit diesem Simulator, der im Grunde jede Straßenumgebung visualisieren kann, können wir diese Entwicklungen zusammen optimieren“, erklärt er.
Peter Nilssons Projekt trägt den Namen „Safe Corridors“ und erforscht Wege, wie man für 27 bis 34 Meter lange Lastzüge sichere Korridore finden kann.
„Ich bin überzeugt, dass diese langen Lastzüge voraussichtlich zwischen 2020 und 2030 auf den Straßen rollen werden, da sie eine sehr umwelteffiziente Alternative darstellen. Bis dahin müssen wir jedoch einen Weg finden, dem Fahrer das Fahren zu erleichtern, denn es ist eine echte Herausforderung, die genaue Position des Aufliegers zu kennen“, erläutert Peter Nilsson.